项目展示

硬件终端
ESP8266与GPS模块组装
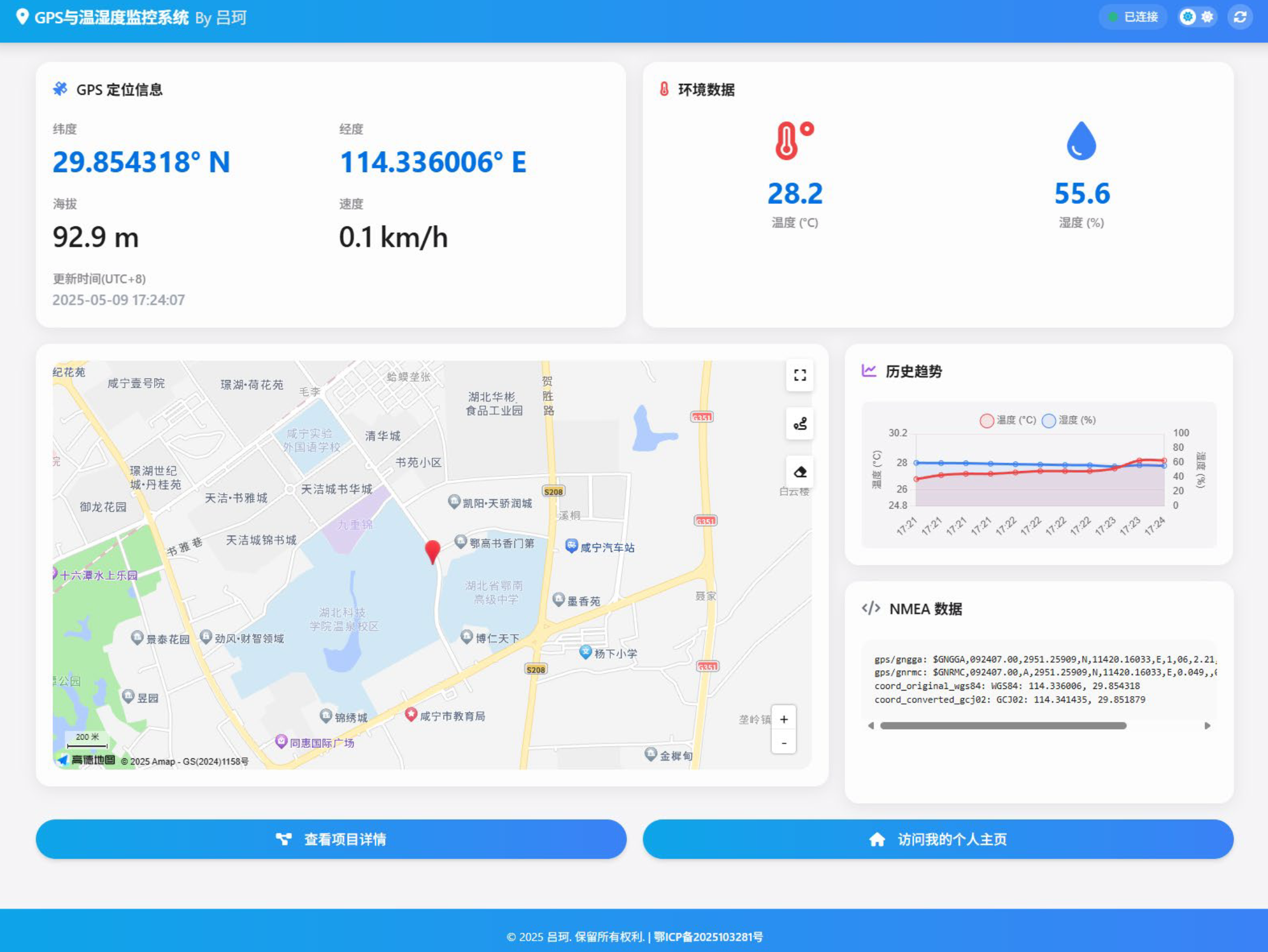
地图界面
实时位置显示
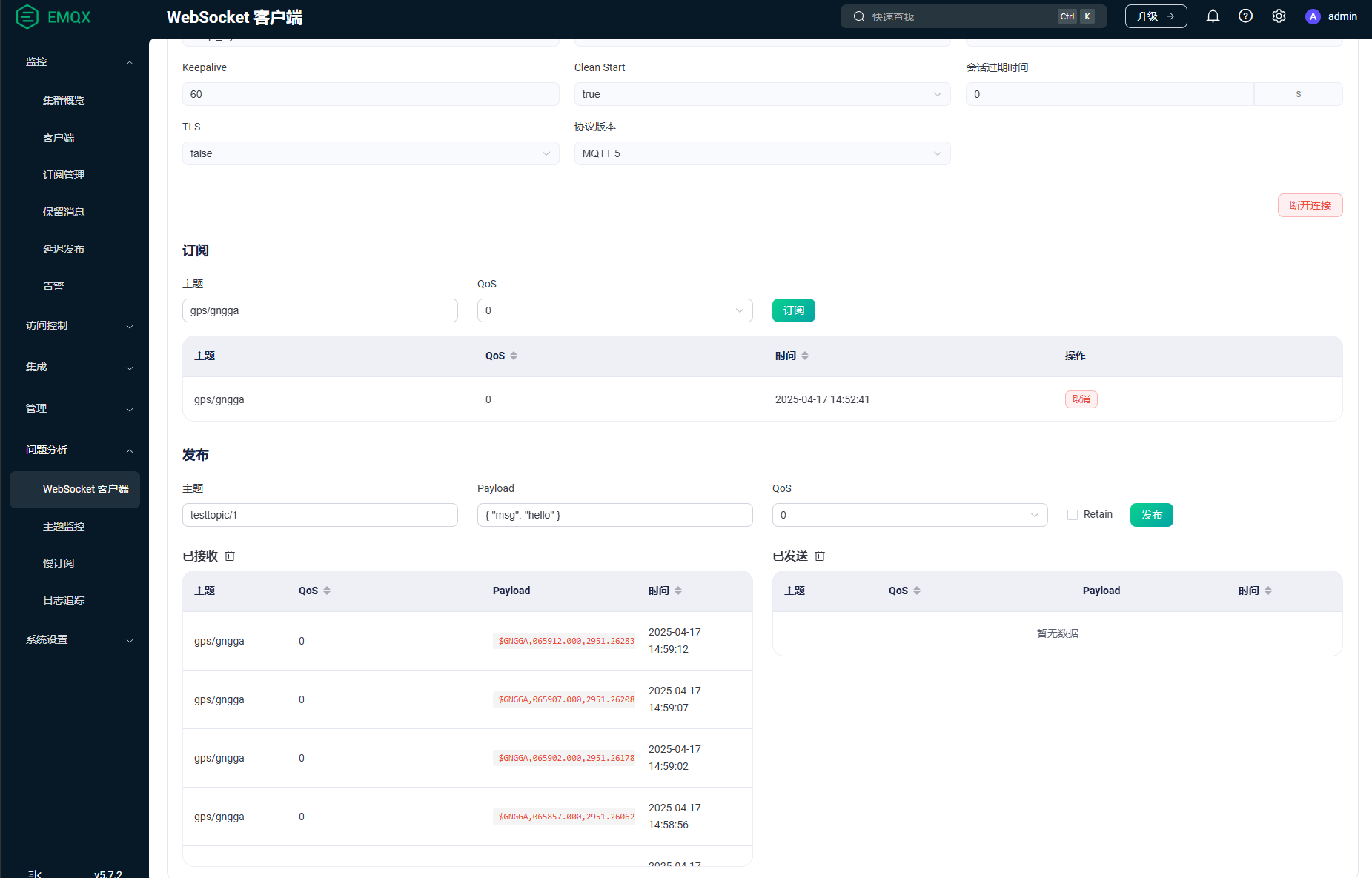
MQTT服务器
基于EMQX的MQTT服务器
项目演示视频
视频展示了系统从硬件到软件的全流程功能演示
ESP8266与GPS模块组装
实时位置显示
基于EMQX的MQTT服务器
视频展示了系统从硬件到软件的全流程功能演示